Our Robots
The RoboBibb Chronicles
Here we provide an honest breakdown of our robots. For us, everything is a learning experience, so we discuss the highs and lows as without them it's just bragging.
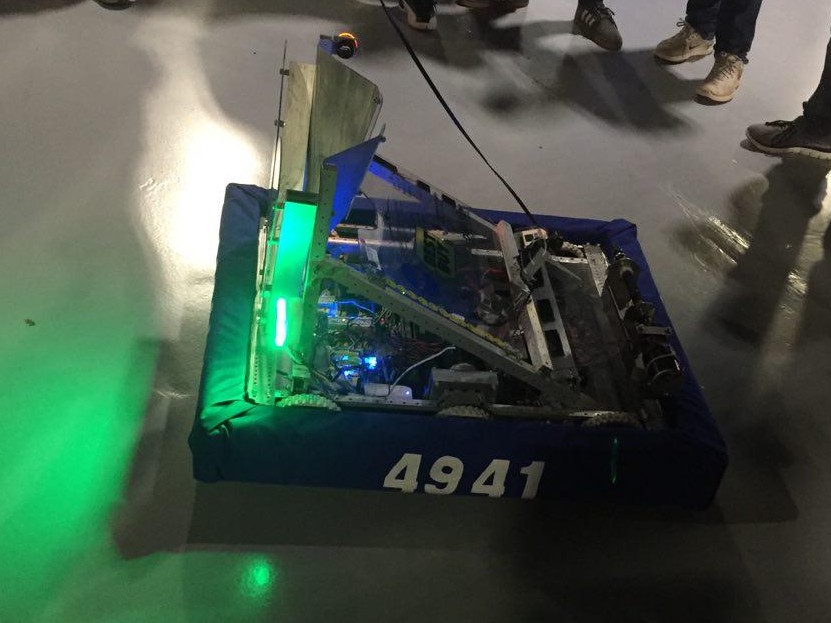
Sandman - SteamWorks (2017)
Design and Planning
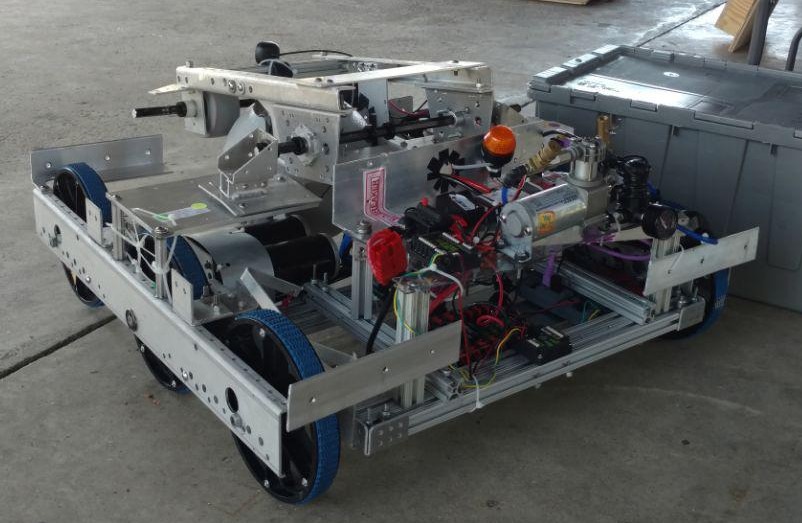
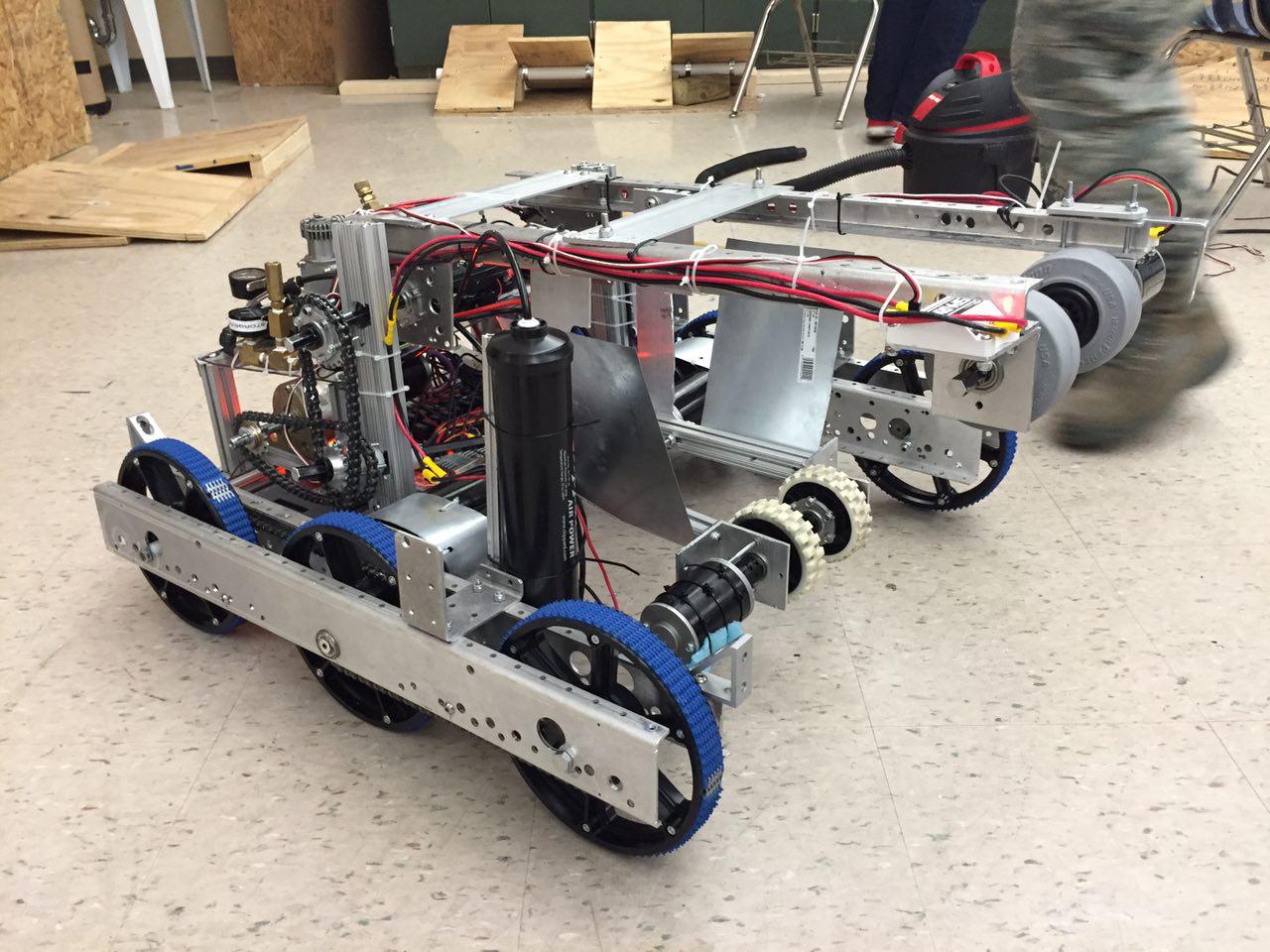
Our goal every competition is to optimize cycle-time. By getting more points per cycle and performing more cycles per match, we are more successful. This year we analyzed all the scoring methods of the game and picked the ones with the best gains vs. effort. We weighed our options: low-boiler gives very few points, not worth our time; high-boiler seemed point efficient if we could get a shooter which is both accurate and rapid-fire, which seemed unrealistic at the time; climbing is merely a free 50 points, we could throw it on essentially any robot we made; gears were easy to score with and very point efficient. We decided on a robot which focused on gears and climbing. Since many teams added these as an afterthought, our well thought out system made us desireable.
This year offered another opportunity for us. We discovered it at Destination Einstein in Columbus, a place we can test our robot on an mock field. Our drive team decided to practice playing defense with Columbus Space Program, Team #4188, we realized that defense was significantly more valuable than it was the year before. To account for this, we overhauled our drive-train to use 6 CIMs (the maximum) instead of the normal 4, giving us extra horsepower. This gave us massive amounts of speed and pushing power. This is best exemplified by one of our matches where because one of our alliance members was slower than us, we got behind them and shoved them across the field so we could both get gears with less delay.
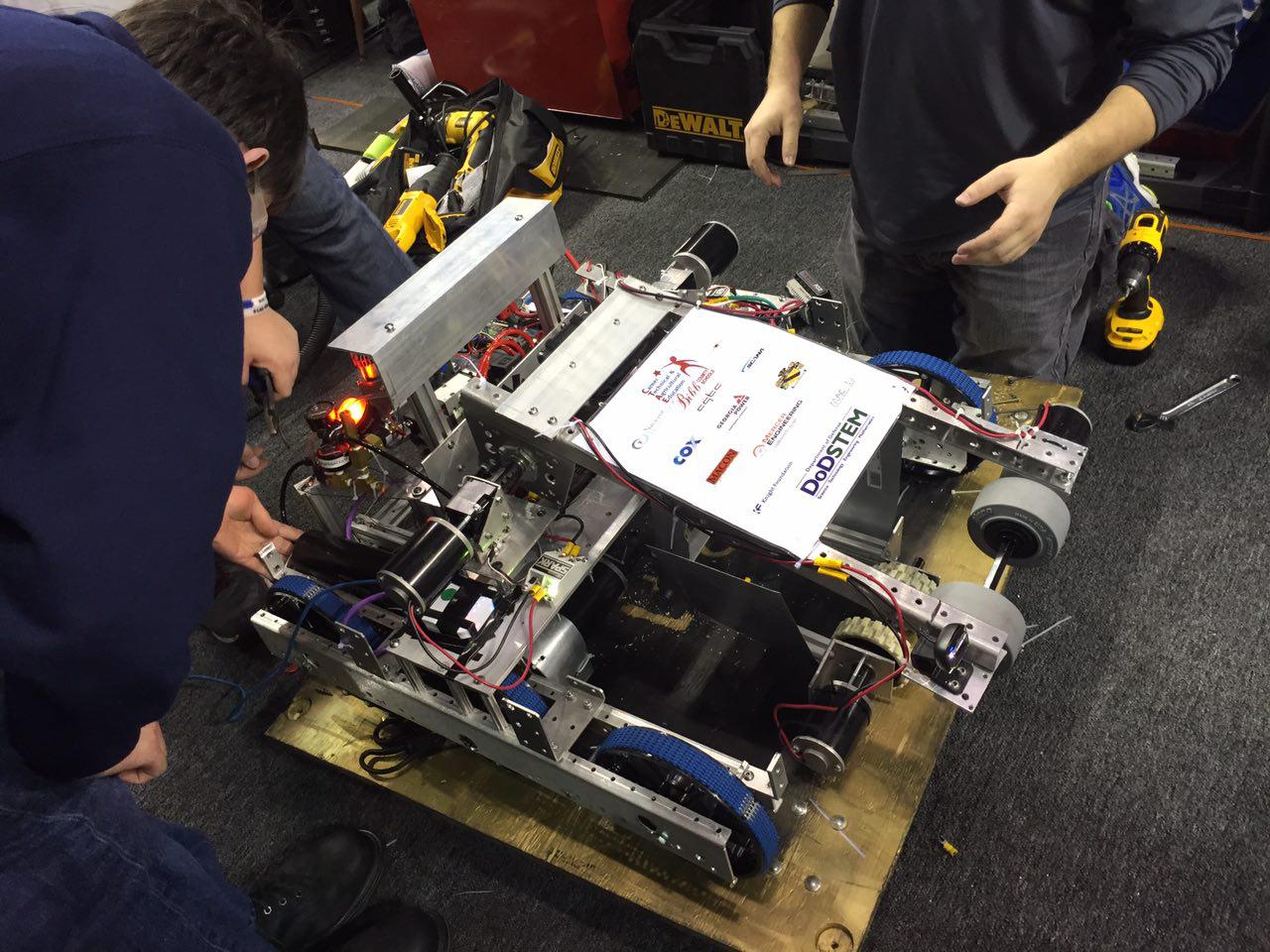
The sponsors panel doubles as a way for us to guard our electronics from gears and fuel which could be flying around. In addition, if a gear were caught on us we wouldn't be able to get more due to the rules. Our winch is strong, quick, and consistent. We also have a camera to help us get the winch aligned. By focusing our time and resources, we have created something we are truly satisfied with, but of course will continue to improve.
Why it's so Successful
This year's robot is practically built for our drive team. They're both speed demons, and we've optimized our robot in several ways to accomodate this. Because of our agressive drivers, the robot is tough as nails. It's a perfect match.
Something that Weijie (scouting team) noticed was that many teams were trying to do too much, the things built to function independently didn't seem to function well as a whole. Different parts of the robot seem to get in the way of each other, and there's too much for the driver to keep track of and control. By keeping our design simple, but optimized, we are able to succeed without being a swiss-army knife sort of robot.
Strengths
- 6 CIM drive train, very powerful, very fast
- Sturdy build with protected electrical board
- Frame and electrical:
- Sponsor board protected internals and opened for convenient access
- Electrionics secured in place with tape
- Wires wound together for durability
- Climber:
- Grippy, quick, and consistent climber
- Modular climber which can be repaired quickly
- We have a second one to add to our alliance members' robot (cheesecake)
- Passive gear intake mechanism
- Guides gear into position
- lets us quickly discard a bad gear
- RoboBibb's best code yet (C++)
Weaknesses
- Cannot process fuel elements (balls)
- Need regular velcro replacements for climber
- No encoders, vision or PID controllers (no hardware)
- Gear intake requires some alignment
- 2015 (roboRio) control system not durable
- Climber gearbox deteriorates in extreme use cases
- If gear isn't properly alligned it could get jammed
- Drivetrain veers to right when moving slowly
- Wheels wear out quickly because of high speed
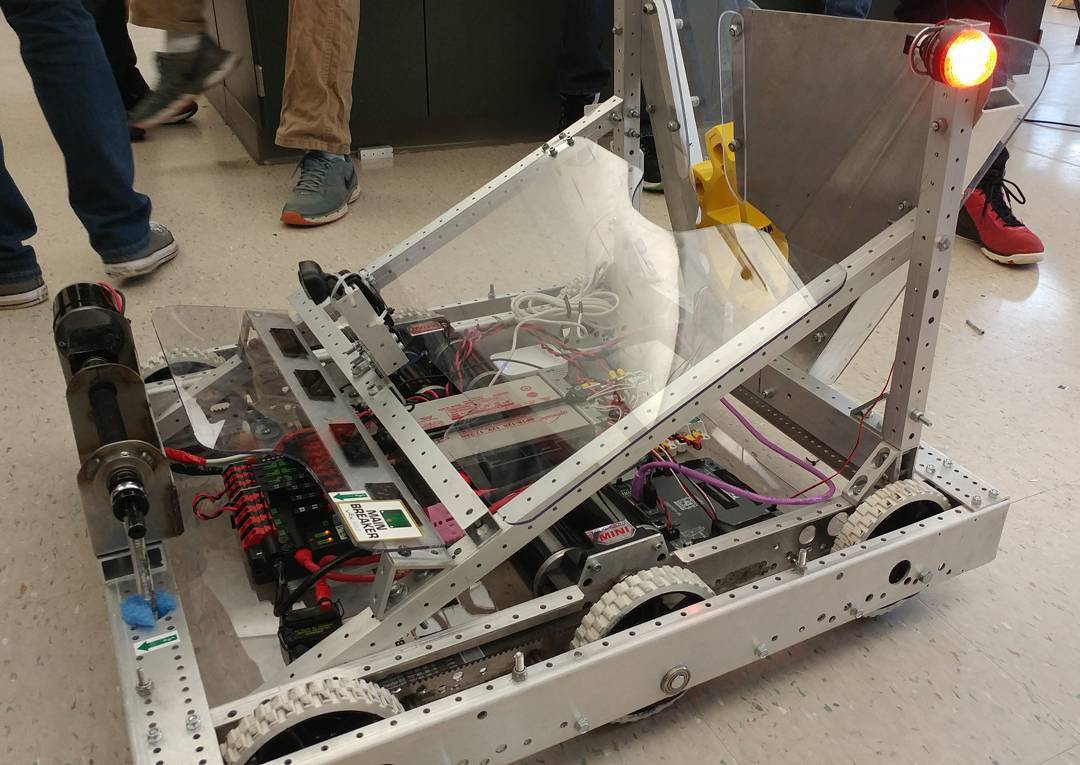
Sir Sophagus - StrongHold (2016)
Although our final product strayed massively from our planned design, in the end we had an effective bot which got the job done. We had a tough robot which was functional and did it's set of tasks well. We focused on low-goal and the defenses.
Strengths
- Dual-shifting gearbox
- Big wheels (speed and versatility)
- Good camera placement
- Fairly sturdy
- Switching from LabVIEW to C++ opens doors
Weaknesses
- Ball sometimes gets jammed in shooter
- Electrical and pneumatics unprotected and unorganized
- Not appealing to the eyes
- Reversible bumpers deteriorated
 more pictures
more pictures
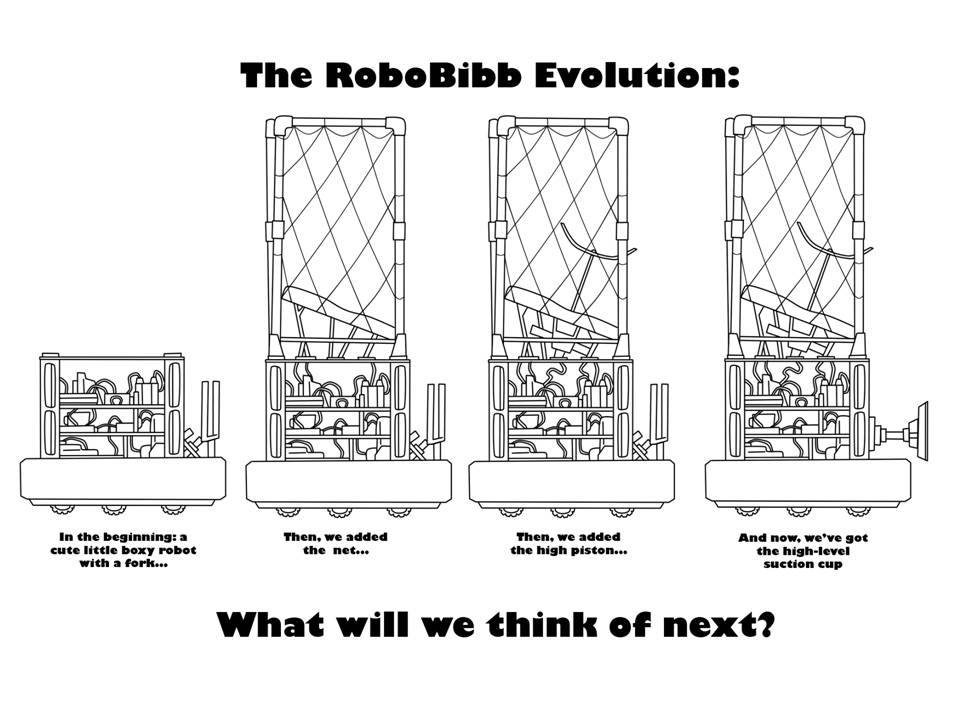
2-Chainz - Recycle Rush (2015)
Although this most definitely wasn't our favorite game, we put in our best effort into our robot, and most importantly had fun.
Strengths
- Using a counter-balance, we were able to make the 6 foot (2 meter) tall robot quite stable
- Paint made parts look attractive at first competition
- Arms survived competition
Weaknesses
- Paint peeled and caused problems
- Arms didn't grip bins as planned
- Arms bend under weight allowing bins to slide off
- Various parts began to bend under stress



Finklebot - Aerial Assist (2014)
This is our team's first ever robot. It's quite an achievement considering it was our team's first year. We had some portions of the robot which rival what we make today.
Strengths
- Catching mechanism functioned perfectly
- High-shooter effective after modifications
- Consistent low-goal-shooter
Weaknesses
- Topheavy
- Picking up ball from floor
- Arms needed to befixed after almost every match
- Vacuum ball-grabbing mechanism non-functional